Overview
A physics-driven simulation of an Autonomous Underwater Vehicle (AUV) operating in a synthetic magnetic field environment.
The system models magnetic anomalies and integrates sensor feedback into navigation behavior.
System Components
- Custom Gazebo plugins for magnetic field sensing
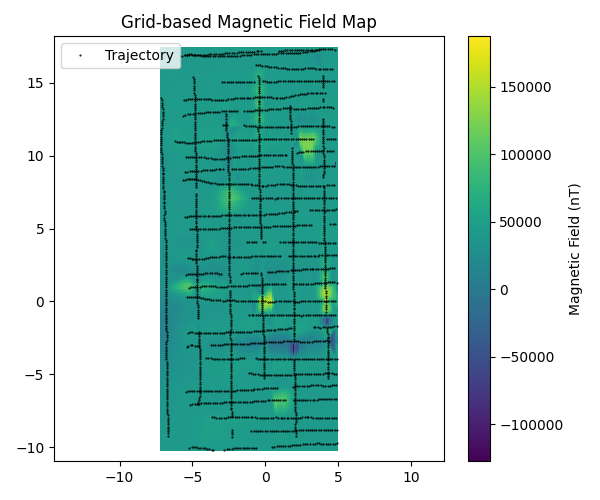
- Frequency-based magnetic anomaly modeling
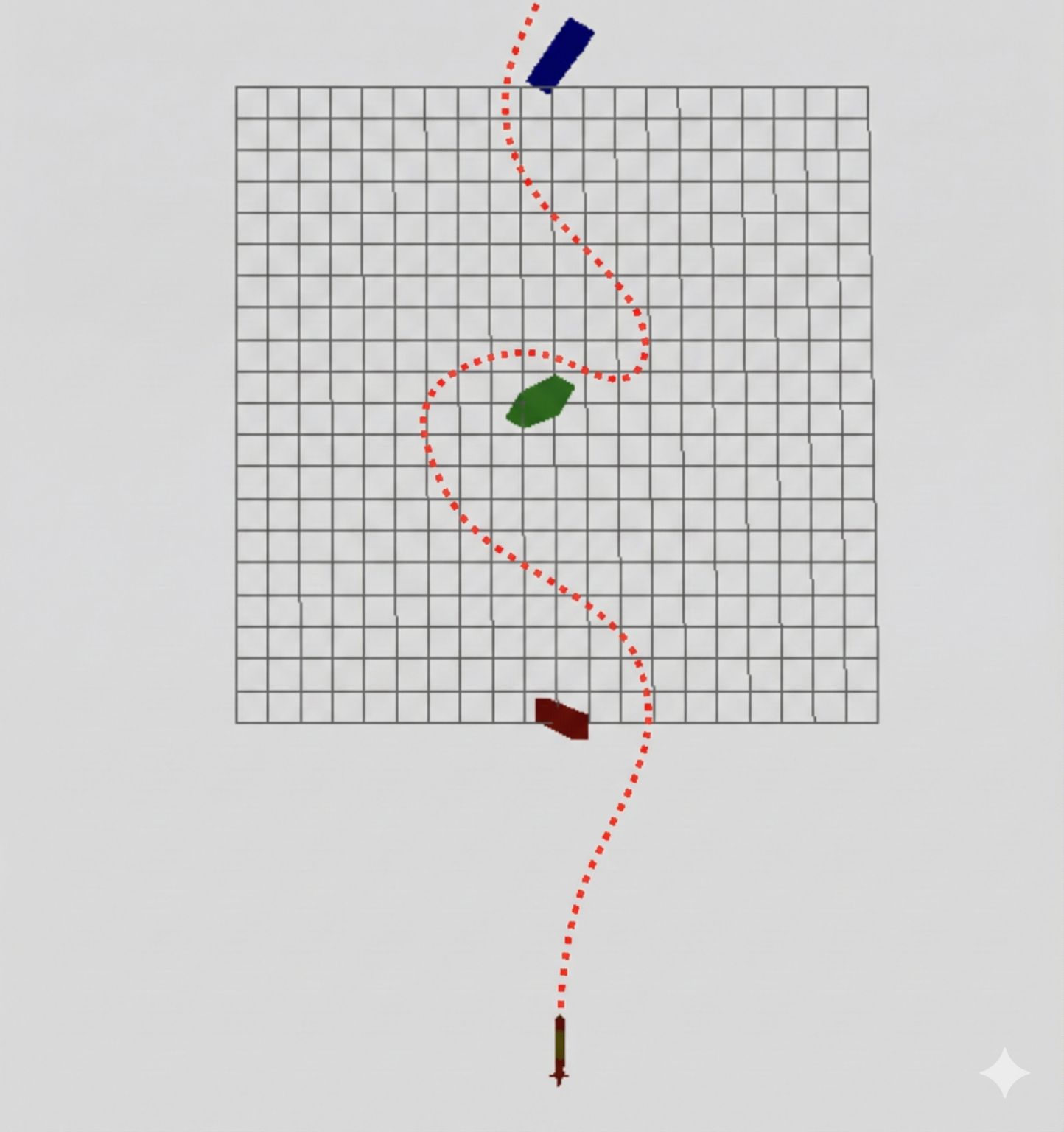
- AUV kinematic and dynamic simulation
- Adaptive waypoint navigation with disturbance handling
- Minimal digital twin of real-world magnetic field conditions
Engineering Focus
- Plugin-level simulation fidelity
- Sensor modeling abstraction
- Environment-to-control feedback loop
Outcome
A modular underwater autonomy framework demonstrating how synthetic sensor models can drive adaptive navigation strategies.