Your ROS 2 robot, production-ready.
Most robotics teams get stuck between prototype and reliable deployment. We specialise in the gap — using simulation-first development so your system is validated before it ever touches hardware.
What we do
Autonomous Navigation
Your robot finds its way reliably — in warehouses, outdoors, or complex environments. We build and tune the Nav2 stack that gets it there without constant intervention.
Manipulation Software
Your robot arm picks, places, and executes tasks precisely. We integrate MoveIt 2, handle collision planning, and make sure it works in the real world, not just in demos.
Simulation & Validation
Your system is tested to failure before you spend a day on hardware. We build high-fidelity simulation environments in Isaac Sim, Gazebo, or Unreal so problems surface in software, not on the floor.
Production Deployment
Your robot ships. Dockerized ROS 2 environments, CI/CD pipelines, and Jetson/NUC deployments that your team can maintain and scale.
How we work
Simulation-first
We validate in sim before touching hardware.
Deterministic
No surprises in production.
Clean architecture
Code your team can own and extend.
Reproducible builds
Same result every time, everywhere.
Systems thinking
We fix root causes, not symptoms.
Recent work
Waypoint-based sensing went from intermittent failure to repeatable execution across 200+ sim validation cycles.
From Simulation to Reality: Building Reliable Robotic Sensing with AgileX Piper Arm
A simulation-to-real case study on making waypoint-based robotic sensing reliable on an AgileX Piper arm through cont...
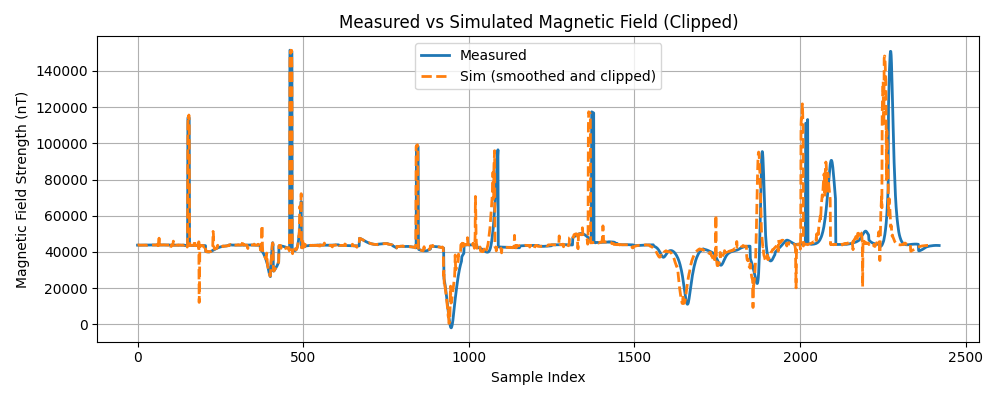
Full underwater vehicle sim with adaptive navigation validated entirely in software before any water testing.
AUV Magnetic Anomaly Simulation
Underwater vehicle simulation with magnetic field modeling and adaptive waypoint navigation.
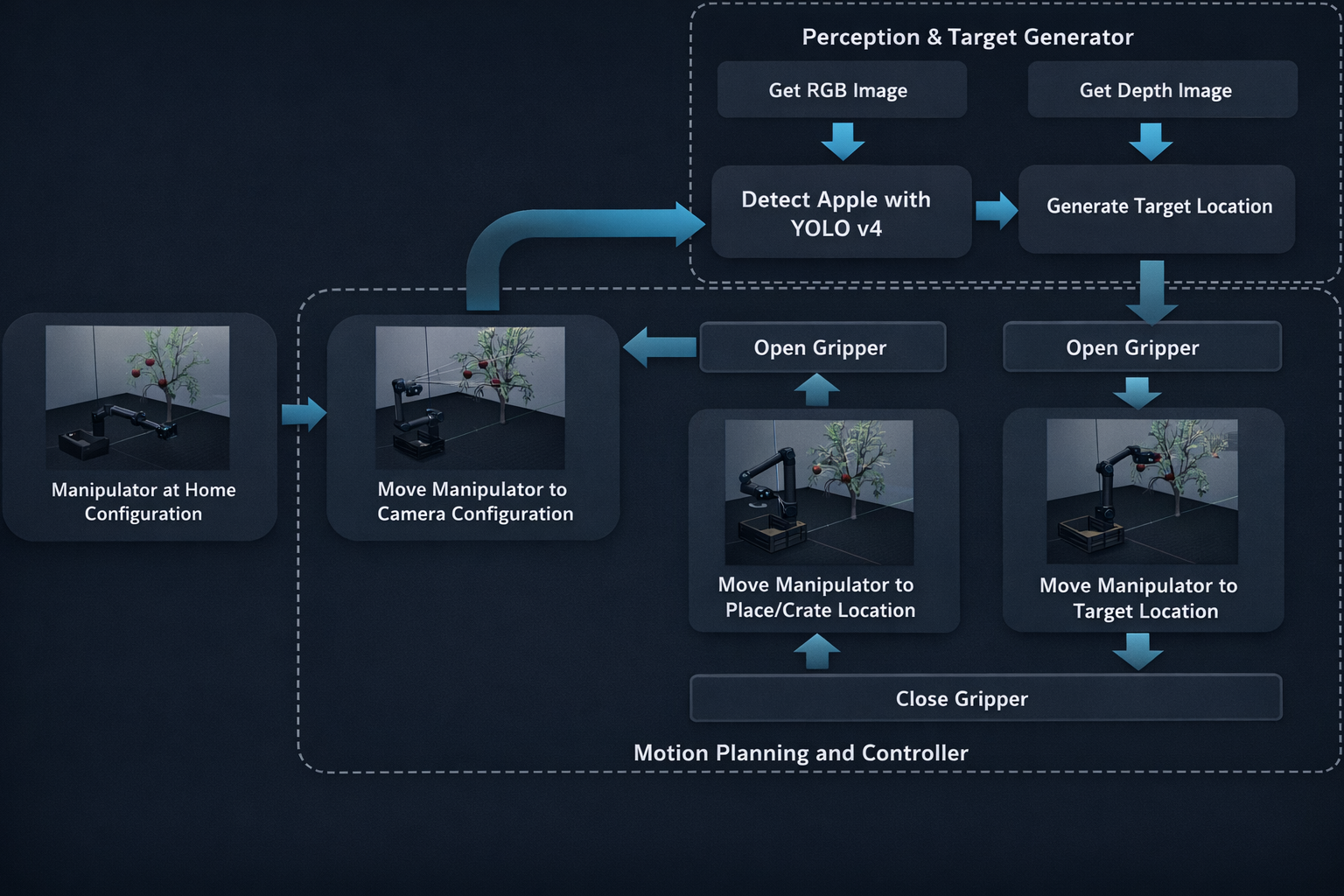
A UR10 manipulation pipeline that plans, detects, and executes picks with collision awareness — no manual parameter tuning per fruit.
Autonomous Fruit Harvesting System
Perception-driven UR10 manipulation pipeline with task planning and collision-aware execution.
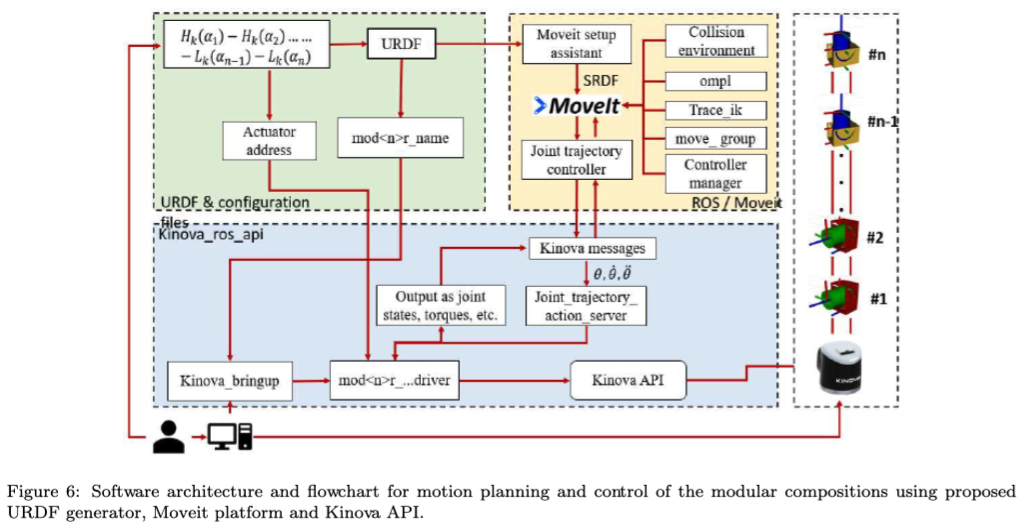
A unified control architecture that works across radically different robot morphologies — sim and hardware.
Modular Reconfigurable Robotics Framework
Simulation and hardware control architecture for unconventional modular manipulators.
Recent writing
Behavior Trees vs State Machines in Robotics: Lessons from Real Robot Workflows
A practical guide based on real robotics workflows, comparing Behavior Trees and State Machines through agriculture and patrol examples, ...
Just Another Automation Tool for Nav2? Not Really.
Why Nav2 tuning is a systems problem, not an automation problem — and how structured benchmarks, YAML-driven experiments, and parameter d...
Designing a Scalable AMR + Manipulator Architecture
A practical guide to designing a scalable AMR + robotic arm architecture for warehouse automation, covering ROS2, MoveIt2, Nav2, MATLAB, ...
Ready to move from prototype to production?
We work with teams building production robotic systems — startups, hardware companies, and R&D labs. If that's you, tell us about your project below and we'll be in touch.
We'll review your situation and follow up with next steps if we're a fit.
Tell us about your projectOr email kodorobotics@gmail.com