Overview
A physics-driven simulation of an Autonomous Underwater Vehicle (AUV) operating in a synthetic magnetic field environment.
The system models magnetic anomalies and integrates sensor feedback into navigation behavior.
System Components
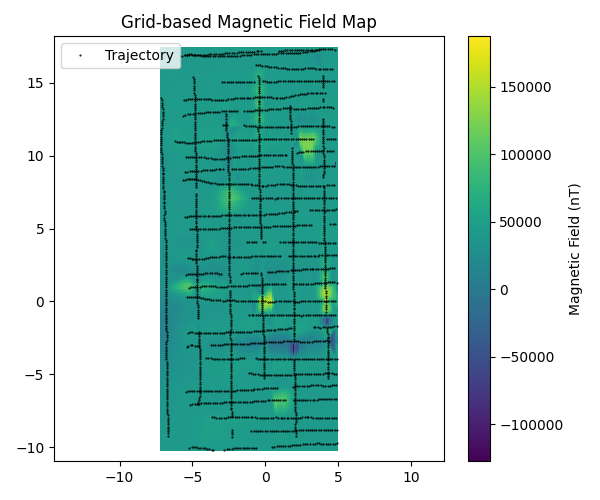
- Custom Gazebo plugins for magnetic field sensing
- Frequency-based magnetic anomaly modeling
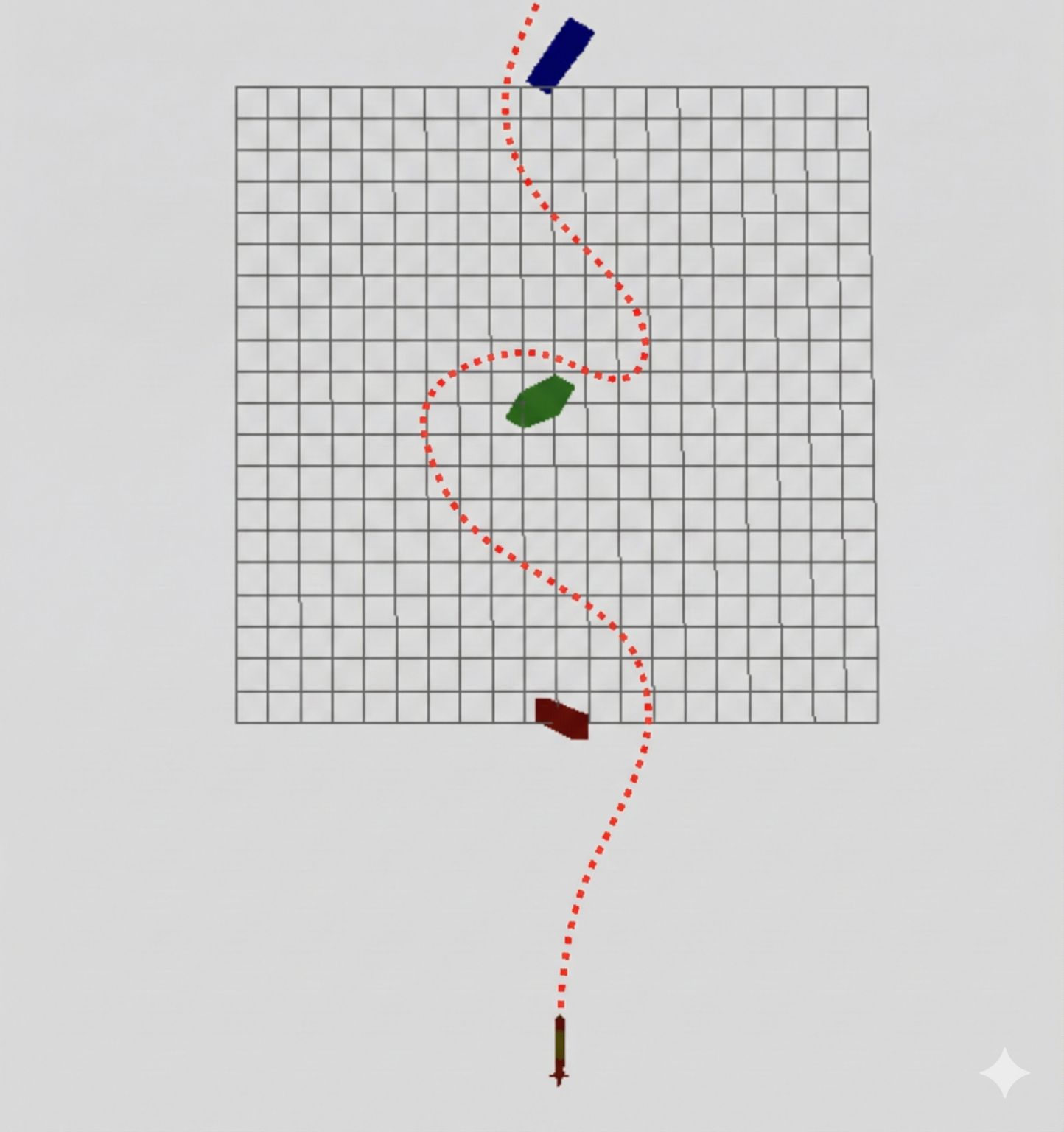
- AUV kinematic and dynamic simulation
- Adaptive waypoint navigation with disturbance handling
- Minimal digital twin of real-world magnetic field conditions
Engineering Focus
- Plugin-level simulation fidelity
- Sensor modeling abstraction
- Environment-to-control feedback loop
Outcome
A modular underwater autonomy framework demonstrating how synthetic sensor models can drive adaptive navigation strategies.
Building autonomous systems that need to be right before the first real-world run?
Underwater vehicles, hazardous environments, remote deployments — these are systems where you cannot afford to discover failures during actual operation. This project was about validating adaptive, sensor-driven autonomy entirely in simulation so that nothing critical is discovered in the water for the first time.
If you are building an autonomous system that operates in difficult or high-stakes environments and needs thorough simulation validation before deployment, we can help.
Tell us about your projectOr email kodorobotics@gmail.com